-
1.给定值设定中工变频控制命令的命令内容是什么,比如它是多少时是工频转变频,是多少时是变频转工频。2.实际值设定中用户输入(输出)端子1,用户输入(输出)端子2,是否是读取多功能数字输入(输出)端子S1-S12 ...
-
E60表示扩展卡物理连接正常但无法识别协议,检查要点:1) 物理层:断电后重插扩展卡,听到"咔"声;检查+24E端子电压22-26V;用万用表测扩展卡金手指对地电阻,正常>1MΩ,若<100kΩ说明卡...
-
LCD键盘采用图形化分层菜单,差异显著:1) 显示分区:顶部状态区实时显示运行时间、故障代码,中部参数区10行显示功能码名称、当前值、默认值、权限,底部操作区5个软键功能动态变化;2) 导航方式:方向...
-
P07.75为无符号16位整数,最大65535小时(约7.5年),掉电保存在EEPROM中,更换控制板会丢失。溢出机制:达到65535后停止计数,保持该值不变,不自动清零,需通过DI端子功能40或通信...
-
1.检查逻辑板和主功率板CN10号排线是否松动;2.将逻辑板和主功率板两端的终端电阻都拨至ON,默认只拨了1个;3,将CN10号排线中的CANH与CANL双绞处理,提升通讯质量; ...
-
1.客户施工梯称重存在单销轴和双销轴两种配置,默认为单销轴模式,若参数设置与实际配置不一致会导致称重值跳动幅度较大;2.称重空载和加载校准,减小称重误差;3.如果单销轴配置施工梯称重值存在偏差较大,可更 ...
-
1.STO安全通道由6组外部信号串联组成,包括防冲顶、防坠微动、急停、单开门限位、双开门限位、天窗限位,信号之间存在优先级;2.测量方法,待机状态,拆掉外围信号,用万用表红表笔放防冲顶-,黑表笔依次测防冲顶+ ...
-
正常使用时要求两路安全输入端子要同时断开或者闭合,满足正常使用,其它的一路安全输入端子断开或者闭合,可以认为非人为的误操作动作;1、当安全输入1断开或安全输入1的内部电路出现异常,但安全输入2及其内部电 ...
-
目前软件优化短路检测报出机制,短路检测由每次使能检测改为每次上电或软复位的时候检测一次,可以P0.76设为0屏蔽短路检测。
-
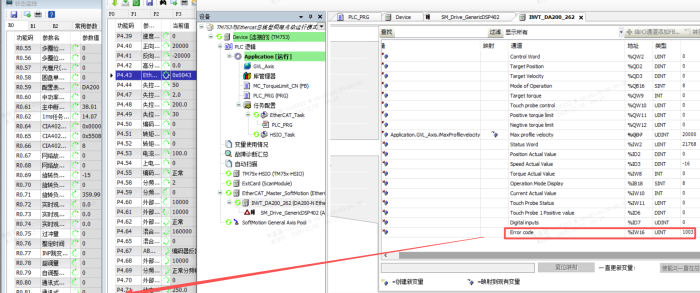
英威腾DA200追剪功能参数详解一、接线准备此客户方案为牵引伺服分频为凸轮轴主轴输入,具体接线如下: 二、调试过程 参数详细解释1.检查电机接线和电机参数:点动测试正常;2.脉冲输入参数设置和测试:P0.20: 电子凸 ...